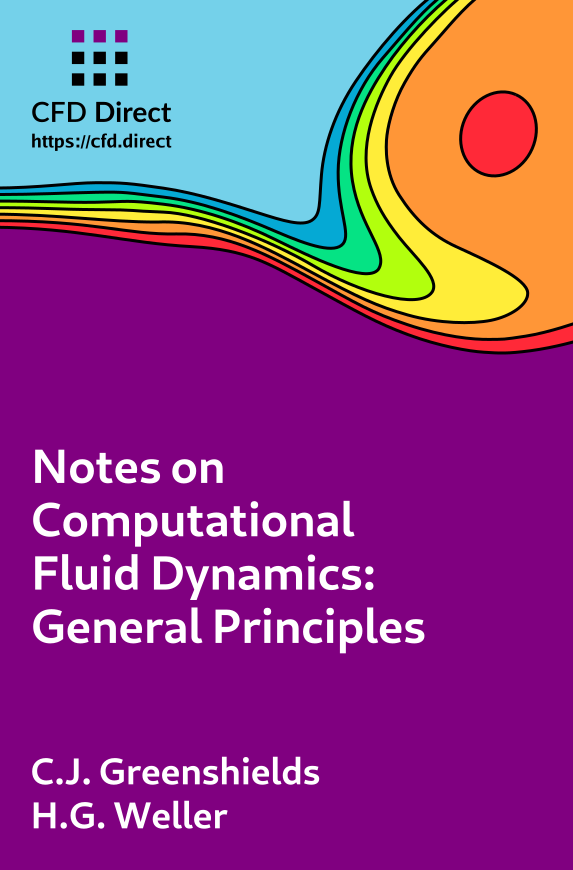
5.1 Structure of matrices
As described in Sec. 3.4
, a matrix equation for
solution variable  contains of a set of coefficients
contains of a set of coefficients  where each row
where each row
 corresponds to the linear equation for the cell with index
corresponds to the linear equation for the cell with index
 as
follows:
as
follows:
 |
(5.1) |
Matrix sparsity
Imagine creating a matrix equation for a
transport equation for a scalar field, e.g. Eq. (2.65
) with
zero heat source  .
.
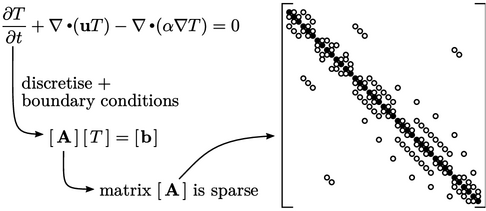
The figure shows a matrix of size  , where
, where
 is
the number of cells. Circles denote non-zero coefficients, which are
filled for the diagonal coefficients (
is
the number of cells. Circles denote non-zero coefficients, which are
filled for the diagonal coefficients ( ). The matrix
). The matrix
 is
sparse, i.e. the majority of the coefficients
is
sparse, i.e. the majority of the coefficients
 are 0 (zero).
are 0 (zero).
The sparsity is due to each cell interacting only with adjacent cells connected through its faces. For example, a 3D mesh of hexahedral cells produces up to 7 coefficients per matrix row, with one diagonal coefficient corresponding to a particular cell and 6 off-diagonal coefficients for the neighbour cells.
Matrix (a)symmetry
A symmetric matrix possesses the same
coefficients across the diagonal, i.e.  . The discretisation of
a Laplacian term, e.g.
. The discretisation of
a Laplacian term, e.g.
 ,
described in Sec. 3.7
, produces
coefficients that are symmetric because the surface normal gradient
Eq. (3.5
) uses the current and
neighbour cell values in equal measure.
,
described in Sec. 3.7
, produces
coefficients that are symmetric because the surface normal gradient
Eq. (3.5
) uses the current and
neighbour cell values in equal measure.
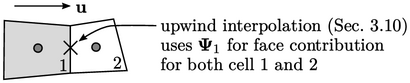
However, the discretisation of an advection term, e.g.  , generally produces
asymmetric coefficients. For
example, if the upwind scheme is applied for flow from cell 1 into
cell 2, then there would a contribution to
, generally produces
asymmetric coefficients. For
example, if the upwind scheme is applied for flow from cell 1 into
cell 2, then there would a contribution to  but not to
but not to
 .
.
Matrix size
Parallel simulation allows affordable solution
on huge meshes. For a mesh of size  , the matrix would have
, the matrix would have
 coefficients, typically with
coefficients, typically with  that are are non-zero.
that are are non-zero.
For reasons of efficiency, zero coefficients are not stored in the computer’s memory. Instead the storage provides an array of non-zero coefficients and addressing arrays of the corresponding row and column indices for each coefficient.