3.15 Gradient discretisation
The discretisation of a gradient  is exclusively
an explicit calculation using current values of
is exclusively
an explicit calculation using current values of  . The conservative
form of gradient calculation is based on a surface integral.
. The conservative
form of gradient calculation is based on a surface integral.
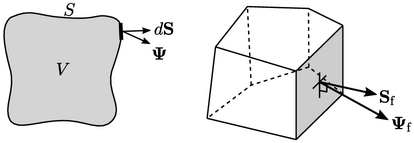
From the gradient definition in Sec. 2.23 , the discretisation is
 |
(3.18) |
 is generally interpolated from cell values using the
linear scheme.
is generally interpolated from cell values using the
linear scheme.
Point linear interpolation
While skewness is generally not a concern for advection discretisation, it deserves greater attention in gradient calculation. For “bad” meshes, e.g. containing elongated tetrahedral cells, the point linear scheme is often adopted to reduce skewness error.
Point
linear interpolation uses: the value  , calculated using
linear interpolation, which corresponds to the “face point” at the
intersection of the line connecting cell centres and the face; and,
values
, calculated using
linear interpolation, which corresponds to the “face point” at the
intersection of the line connecting cell centres and the face; and,
values  at each vertex, interpolated from adjacent cells using
inverse-distance weighting.
at each vertex, interpolated from adjacent cells using
inverse-distance weighting.
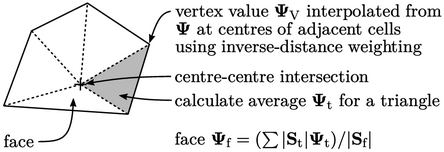
The scheme breaks the polygonal face into
triangles and calculates the average value  at the 2 vertices and
face point for each triangle, area
at the 2 vertices and
face point for each triangle, area  . Point interpolation
calculates the face value as the area-weighted average of triangle
values, i.e.
. Point interpolation
calculates the face value as the area-weighted average of triangle
values, i.e.  .
.
Least squares gradient
A gradient calculation using a least squares finite difference method is sometimes used within the finite volume framework. The method calculates the gradient in a cell which, when used to extrapolate the cell value to centres of all neighbouring cells, minimises the error between extrapolated values and cell values.
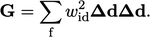
For a given cell, a tensor  is calculated by
summing over faces using the inverse distance weighting
is calculated by
summing over faces using the inverse distance weighting
 ,
where
,
where  is the cell centre-centre vector:
is the cell centre-centre vector:
 |
(3.19) |
 and values in the neighbour (N) and current (P) cells:
and values in the neighbour (N) and current (P) cells:
 |
(3.20) |