5.4 Residual
In Sec. 5.3 , we established a criterion for convergence of the Gauss-Seidel method. We now need a way to estimate a level of convergence to determine when to stop iterating.
The analysis of convergence centred on the
solution error  , introduced in Sec. 5.2
. In practice,
, introduced in Sec. 5.2
. In practice,  cannot be
determined since the exact solution is unknown. Instead the
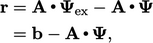
residual provides a measure
of the accuracy of the solution. The residual vector
cannot be
determined since the exact solution is unknown. Instead the
residual provides a measure
of the accuracy of the solution. The residual vector  represents the change
to the solution of the equation, required to make
represents the change
to the solution of the equation, required to make  exact, according
to
exact, according
to
 |
(5.10) |
 .
.
 is replaced by
is replaced by
 ,
equivalent to vector notation with an
,
equivalent to vector notation with an  tensor
tensor  .
.The vector  (of size
(of size  ) provides
one value per matrix row,
with both positive and negative values. A measure of residual given
by a single value, is
defined as
) provides
one value per matrix row,
with both positive and negative values. A measure of residual given
by a single value, is
defined as
 |
(5.11) |
 is the matrix norm, calculated as the sum of the magnitude
of each component, e.g.
is the matrix norm, calculated as the sum of the magnitude
of each component, e.g.
 ;
the mean value of
;
the mean value of  over all cells is denoted by
over all cells is denoted by  .
.
The residual  provides a measure of
error in the solution of
provides a measure of
error in the solution of
 ,
rather than the absolute
error
,
rather than the absolute
error  . It is divided by the norms of
. It is divided by the norms of  and
and  to reduce its
dependency on the scale of the geometry and solution variable. By
reducing its scale-dependency,
to reduce its
dependency on the scale of the geometry and solution variable. By
reducing its scale-dependency,  can be used to compare
the level of error equitably between simulations at different
scales.
can be used to compare
the level of error equitably between simulations at different
scales.
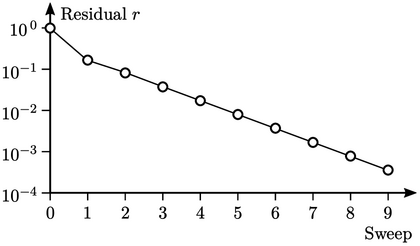
The figure above shows  calculated from
Eq. (5.11
) following successive sweeps of
the Gauss-Seidel method (starting from the initial
calculated from
Eq. (5.11
) following successive sweeps of
the Gauss-Seidel method (starting from the initial  ). The graph uses a
logarithmic vertical scale since the values of
). The graph uses a
logarithmic vertical scale since the values of  extend over 4 orders
of magnitude.
extend over 4 orders
of magnitude.
Tolerance
CFD software generally provides the following controls to stop the iterative solver:
 ;
; .
.Sweeping ceases if either tolerance condition is satisfied:
 ;
or
;
or  , where
, where  is the initial residual within the particular
solution step. The
is the initial residual within the particular
solution step. The  criterion is often deactivated by setting
criterion is often deactivated by setting
 ,
especially for transient simulations when sufficient accuracy is
required at every solution step.
,
especially for transient simulations when sufficient accuracy is
required at every solution step.