Contents
2 Total Energy
3 Internal Energy
4 Total Energy/Enthalpy, local derivatives
5 Energy Equation in OpenFOAM Solvers
6 Total vs Internal Energy
1 Introduction
This article provides information on the equation describing conservation of energy relevant to fluid dynamics and computational fluid dynamics (CFD). It first assembles an equation for combined mechanical and thermal energy, i.e. total energy, in terms of material derivatives. It then presents an equation for thermal, or internal, energy. The total energy equation is then provided in terms of local (partial) derivatives, both in terms of internal energy and enthalpy. The implementation of the energy equation in solvers in OpenFOAM is then described.
Some of the information in this article is also presented in the book Notes on CFD: General Principles.
2 Total Energy
The law of conservation of energy states that the total energy of an isolated
system remains constant, i.e. it is conserved over time and energy is not
created or destroyed but is transformed from one form to another. Here we
consider only mechanical and thermodynamic energy, the contributions of
which are described in the following sections, using usual notation of
tensor algebra and calculus, including  representing the material
derivative.
representing the material
derivative.
2.1 Mechanical Power
The rate of change of mechanical, or kinetic, energy is:
 | (1) |
 is velocity, specific kinetic energy (kinetic energy per unit mass)
is velocity, specific kinetic energy (kinetic energy per unit mass)
 and
and  is mass density. The power flux, or rate of change of
strain energy, is
is mass density. The power flux, or rate of change of
strain energy, is
 | (2) |
 is the mechanical stress tensor. The stress tensor may be decomposed
is the mechanical stress tensor. The stress tensor may be decomposed
 into a scalar thermodynamic pressure
into a scalar thermodynamic pressure  and viscous stress tensor
and viscous stress tensor  by
by
 , where
, where  is the identity tensor. The power source, or rate of
change of potential energy, is
is the identity tensor. The power source, or rate of
change of potential energy, is
 | (3) |
 is a body acceleration, e.g. gravity.
is a body acceleration, e.g. gravity.
2.2 Thermodynamic Power
The rate of change of thermal, or internal, energy is
 | (4) |
 is specific internal energy (internal energy per unit mass). The heat
flux is
is specific internal energy (internal energy per unit mass). The heat
flux is
 | (5) |
 is the heat flux vector, defined positive inwards. The heat source is
is the heat flux vector, defined positive inwards. The heat source is
 | (6) |
 is any specific heat source.
is any specific heat source.
2.3 Conservation of Energy
The rate of change of total energy for a particle of material must equal the input of mechanical and thermodynamic power from fluxes and sources acting on the particle. In the limit where particle size is infinitesimally small
 | (7) |
3 Internal Energy
An equation for internal energy is produced by simplifying the mechanical contributions which, expressed as
 | (8) |
 | (9) |
 . Equation 7 can then be
expressed as
. Equation 7 can then be
expressed as
 | (10) |
 term represents the contribution of mechanical power to internal
energy, and thus, random motion of particles. The expression
term represents the contribution of mechanical power to internal
energy, and thus, random motion of particles. The expression  must
then represent a power due bulk motion of particles.
must
then represent a power due bulk motion of particles.
4 Total Energy/Enthalpy, local derivatives
We can express our equations in terms of the local derivative (or partial
derivative, spatial derivative, …)  , where
, where  . Applying
conservation of mass, the following relationship holds for any tensor
. Applying
conservation of mass, the following relationship holds for any tensor  :
:
 | (11) |
Combining equations 7 and 11, and decomposing the stress tensor
 , gives:
, gives:
 | (12) |
Enthalpy is the sum of internal energy and kinematic pressure,
i.e.  . Combining this with equation 12 gives:
. Combining this with equation 12 gives:
 | (13) |
Total energy can be defined as  . Combining this with equation 12
gives:
. Combining this with equation 12
gives:
 | (14) |
5 Energy Equation in OpenFOAM Solvers
The solution of the energy equation is included in several solvers in OpenFOAM for compressible flow, combustion, heat transfer, multiphase flow and particle tracking. The source code can be found for these solvers within files in sub-directories of the $FOAM_SOLVERS directory of OpenFOAM (including the compressible, combustion, heatTransfer, multiphase and lagrangian sub-directories).
The energy equation is generally implemented in the form of total energy
expressed in equations 12 and 13, without the mechanical sources  and
and  . A heat flux
. A heat flux  is assumed, where the effective thermal
diffusivity
is assumed, where the effective thermal
diffusivity  is the sum of laminar and turbulent thermal diffusivities. The
implementation of each energy equation contains thermal source terms
is the sum of laminar and turbulent thermal diffusivities. The
implementation of each energy equation contains thermal source terms  relevant to the particular solver.
relevant to the particular solver.
For example, the sonicFoam solver contains the following implementation of the energy equation from equation 12.
(
fvm::ddt(rho, e) + fvm::div(phi, e)
+ fvc::ddt(rho, K) + fvc::div(phi, K)
+ fvc::div(fvc::absolute(phi/fvc::interpolate(rho), U), p, "div(phiv,p)")
- fvm::laplacian(turbulence->alphaEff(), e)
==
fvOptions(rho, e)
);
sonicFoam solves equations sequentially, so solves the momentum equation
for  before updating the specific kinetic energy field
before updating the specific kinetic energy field  for the energy equation above. More commonly, the energy equation is
implemented in terms of both internal energy
for the energy equation above. More commonly, the energy equation is
implemented in terms of both internal energy  and enthalpy
and enthalpy  , as both
equations 12 and 13, allowing the user to choose the solution variable,
, as both
equations 12 and 13, allowing the user to choose the solution variable,  or
or  ,
at run time. For example, the rhoPimpleFoam solver has the following
implementation:
,
at run time. For example, the rhoPimpleFoam solver has the following
implementation:
fvScalarMatrix EEqn
(
fvm::ddt(rho, he) + fvm::div(phi, he)
+ fvc::ddt(rho, K) + fvc::div(phi, K)
+ (
he.name() == "e"
? fvc::div
(
fvc::absolute(phi/fvc::interpolate(rho), U),
p,
"div(phiv,p)"
)
: -dpdt
)
- fvm::laplacian(turbulence->alphaEff(), he)
==
fvOptions(rho, he)
);
Here, “he” represents either  or
or  . The 5th term switches between
. The 5th term switches between
 and
and  depending on the solution variable chosen by the
user.
depending on the solution variable chosen by the
user.
The rhoCentralFoam solver includes an implementation of an energy equation
best represented by equation 14 that includes the mechanical source
 .
.
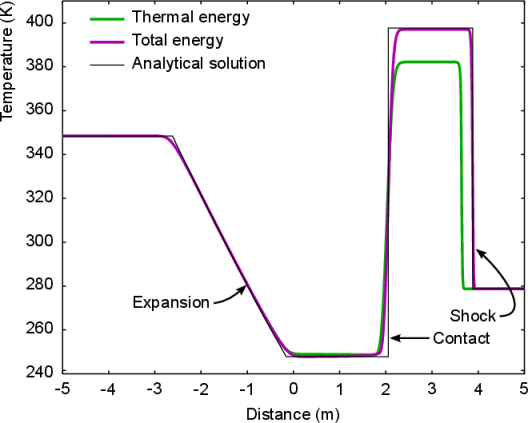
6 Total vs Internal Energy
The choice of energy equation has a significant on some solutions particularly across shocks. In the well known 1D shockTube tutorial example (Sod’s problem), the initial discontinuity causes a shock to propagate into the low pressure region and an expansion wave to propagate upstream. The figure below shows the temperature after 0.007 s, with simulation results compared with the analytical solution. Using the version of sonicFoam prior to OpenFOAM v2.2.0 that solves a thermal energy equation, the temperature difference across the shock is badly predicted. Using sonicFoam from v2.2.0 onwards that solves a total energy equation, conservation of total energy ensures the temperature difference is predicted accurately.