
Contents
2 Scalars and Vectors
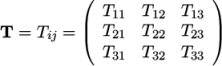
3 Second Rank Tensors
4 Higher Rank Tensors
5 Coordinate System and Change of Axes
6 Tensor Calculus
7 Integral Theorems
1 Introduction
This article provides information on tensor mathematics, relevant to fluid dynamics and computational fluid dynamics (CFD). It describes scalars and vectors and typical algebraic vector operations. It follows with second rank tensors, their algebraic operations, symmetry, skewness and tensor invariants such as trace and determinant. It briefly discusses higher rank tensors before describing co-ordinate system and change of axis. Tensor calculus is introduced, along with derivative operators such as div, grad, curl and Laplacian. The final section covers the integral theorems of Gauss and Stokes, with a physical representation of div and curl, and scalar and vector potentials.
Some of the information in this article is also presented in the book Notes on CFD: General Principles.
2 Scalars and Vectors
A scalar is any physical property which can be represented by a single real
number in some chosen unit system, e.g. pressure ( ), temperature
(
), temperature
( ) and density (
) and density ( ). Scalars are denoted by single letters in italics, e.g.
). Scalars are denoted by single letters in italics, e.g.
 ,
,  ,
,  . The standard scalar operations must be performed using
consistent units of measurement; in particular, addition, subtraction and
equality are only physically meaningful for scalars of the same dimensional
units.
. The standard scalar operations must be performed using
consistent units of measurement; in particular, addition, subtraction and
equality are only physically meaningful for scalars of the same dimensional
units.
A vector is an entity which is represented by both magnitude and direction.
In its most general form an  -dimensional vector
-dimensional vector  can be denoted by
can be denoted by
 scalar components
scalar components  corresponding to coordinate axes
corresponding to coordinate axes
 . For continuum mechanics, where we deal with 3 dimensional
(Euclidian) space, the vector
. For continuum mechanics, where we deal with 3 dimensional
(Euclidian) space, the vector  relates to a general set of axes
relates to a general set of axes
 ; representing
; representing  in a rectangular Cartesian system (see
Section 5.1) or
in a rectangular Cartesian system (see
Section 5.1) or  and
and  in cylindrical and spherical polar coordinates.
The index notation presents the same vector as
in cylindrical and spherical polar coordinates.
The index notation presents the same vector as  (
( ) in
which
) in
which  corresponds to each of the coordinate axes. The list of indices
(
corresponds to each of the coordinate axes. The list of indices
( ) is usually omitted in mathematical text since it is implied
by the form of the equation in which it is written. In this article the
tensor notation will generally be used in which a vector or tensor (see
Section 3) is represented by letters in bold face, e.g.
) is usually omitted in mathematical text since it is implied
by the form of the equation in which it is written. In this article the
tensor notation will generally be used in which a vector or tensor (see
Section 3) is represented by letters in bold face, e.g.  . The benefits of
this notation are that: it does not imply anything about the coordinate
system; it therefore promotes the concept of a vector as a entity with
direction and magnitude rather than a group of three scalars; and, it is more
compact.
. The benefits of
this notation are that: it does not imply anything about the coordinate
system; it therefore promotes the concept of a vector as a entity with
direction and magnitude rather than a group of three scalars; and, it is more
compact.
The magnitude, or modulus of a vector  or
or  is denoted by
is denoted by  and
and  in respective notations. Vectors of unit magnitude are referred to as unit vectors.
It is assumed that the reader is familiar with the basic operations of
multiplication of a vector and scalar and vector addition and subtraction,
which are both commutative and associative. The next three sections
describe the remaining vector and tensor operations required in continuum
mechanics.
in respective notations. Vectors of unit magnitude are referred to as unit vectors.
It is assumed that the reader is familiar with the basic operations of
multiplication of a vector and scalar and vector addition and subtraction,
which are both commutative and associative. The next three sections
describe the remaining vector and tensor operations required in continuum
mechanics.
2.1 The scalar product of two vectors
The scalar product of two vectors  and
and  is
defined as
is
defined as
 | (1) |
The following behaviour is observed:
 | (2) |
 | (3) |
 | (4) |
The geometrical representation of the scalar product is  as
depicted by the shaded area in figure 1:
as
depicted by the shaded area in figure 1:
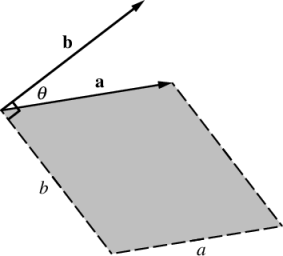
The scalar product is invariant under a transformation of axes since it is defined by the magnitudes of the two vectors and the angle between them. The concept of invariance is important to continuum mechanics and can be discussed further once the the ideas of change of axes have been described mathematically in Section 5.
2.2 The vector product of two vectors
The vector product of a vector  with
with  is defined
as
is defined
as
 | (5) |
where the permutation symbol
 | (6) |
where the even permutations are 123, 231 and 312 and the odd permutations are 132, 213 and 321. The following behaviour is observed:
 | (7) |
 | (8) |
 | (9) |
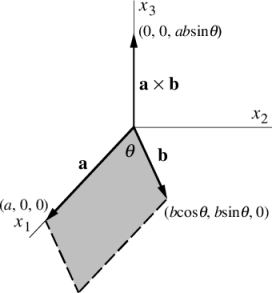
The geometrical representation of the vector product can be illustrated by
defining  and
and  to lie in the
to lie in the  plane of a rectangular coordinate system
plane of a rectangular coordinate system
 ,
,  and
and  . The vector product is
then
. The vector product is
then  which can be seen in figure 2 to follow the
direction of the
which can be seen in figure 2 to follow the
direction of the  axis. Therefore, the vector product represents a normal vector
of magnitude equal to the area of a parallelogram described by vectors
axis. Therefore, the vector product represents a normal vector
of magnitude equal to the area of a parallelogram described by vectors  and
and
 . The direction of the normal vector follows the convention of a set of right
handed axes as defined in Section 5.1.
. The direction of the normal vector follows the convention of a set of right
handed axes as defined in Section 5.1.
The Kronecker delta  is another useful symbol to shorten equations in
index notation. It is defined by
is another useful symbol to shorten equations in
index notation. It is defined by
 | (10) |
It is sometimes useful to know the  identity to help to manipulate
vector equations:
identity to help to manipulate
vector equations:
 | (11) |
3 Second Rank Tensors
A second rank tensor is defined here as a linear vector function, i.e. it is a function which associates an argument vector to another vector. A vector is itself a first rank tensor and a scalar is a tensor of rank zero. Higher rank tensors are discussed briefly later but for the mostpart we deal with second rank tensors which are often be simply referred to as tensors.
The tensor acts as a linear vector function as follows:
 | (12) |
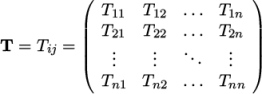
An  -dimensional second rank tensor, T or
-dimensional second rank tensor, T or  has
has  components which
can be expressed in a array corresponding to axes
components which
can be expressed in a array corresponding to axes  as:
as:
 | (13) |
The components for which  are often referred to as the diagonal
components, and those for
are often referred to as the diagonal
components, and those for  can be referred to as the off-diagonal
components. The use of the array notation should be used sparingly since it can
makes the algebra unwieldy and the notation becomes almost unmanageable for
tensors of rank higher than two. For the remainder of this chapter, the
3-dimensional tensor with 9 components will be used to present tensor algebra in
array notation:
can be referred to as the off-diagonal
components. The use of the array notation should be used sparingly since it can
makes the algebra unwieldy and the notation becomes almost unmanageable for
tensors of rank higher than two. For the remainder of this chapter, the
3-dimensional tensor with 9 components will be used to present tensor algebra in
array notation:
 | (14) |
3.1 The single dot product
Equation (12) can be written in tensor notation as a single dot product operation pairing one geometric vector to another (expanding the vector in a column for convenience)
 | (15) |
If we now define the tensor  to be the transpose of
to be the transpose of  ,
,  , as
, as
 , then:
, then:
 | (16) |
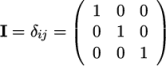
The identity tensor  is defined by the requirement that
is defined by the requirement that
 | (17) |
and therefore:
 | (18) |
3.2 Symmetric and skew (antisymmetric) tensors
A tensor is said to be symmetric if its components are symmetric, i.e.  .
A skew or antisymmetric tensor has
.
A skew or antisymmetric tensor has  which intuitively implies that
which intuitively implies that
 . Every second rank tensor can be represented by
symmetric and skew parts by
. Every second rank tensor can be represented by
symmetric and skew parts by
 | (19) |
A symmetric or skew tensor remains symmetric or skew under a transformation of axes, i.e. symmetry and skew-symmetry are intrinsic properties of a tensor, being independent of the coordinate system in which they are represented.
3.3 The scalar product of two tensors
The scalar product of two tensors is denoted by  which can be
evaluated as the sum of the nine products of the tensor components
which can be
evaluated as the sum of the nine products of the tensor components
 | (20) |
The ‘ ’ notation is used by some authors to define another scalar product
which is denoted here by
’ notation is used by some authors to define another scalar product
which is denoted here by 
 | (21) |
Of course, there is no need to distinguish between the two definitions of scalar product if either of the tensors is symmetrical.
3.4 The tensor product of two vectors
The tensor product of two vectors, denoted by  (sometimes denoted
(sometimes denoted  ),
is defined by the requirement that
),
is defined by the requirement that  for all
for all  and produces a
tensor whose components are evaluated as:
and produces a
tensor whose components are evaluated as:
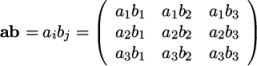 | (22) |
3.5 The tensor product of two tensors
The tensor product of two tensors combines two operations  and
and  so that
so that
 is performed first, i.e.
is performed first, i.e. for all
for all  . It is denoted by
. It is denoted by
 and produces a tensor whose components are evaluated as:
and produces a tensor whose components are evaluated as:
 | (23) |
The product is only commutative is both tensors are symmetric since
![T T T
T ∙S = [S ∙T ] \relax \special {t4ht=](img/index94x.png) | (24) |
3.6 The trace of a tensor
The trace of a tensor is a scalar invariant function of the tensor, denoted by
 | (25) |
3.7 The determinant of a tensor
The determinant of a tensor is also a scalar invariant function of the tensor denoted by
 |
 | (26) |
4 Higher Rank Tensors
In Section 3.4 an operation was defined for the product of two vectors which
produced a second rank tensor. Tensors of higher rank than two can be formed
by the product of more than two vectors, e.g. a third rank tensor 

 , a
fourth rank tensor
, a
fourth rank tensor  . If one of the tensor products is replaced by a scalar
(
. If one of the tensor products is replaced by a scalar
( ) product of two vectors, the resulting tensor is two ranks less than the
original. For example,
) product of two vectors, the resulting tensor is two ranks less than the
original. For example,  is a second rank tensor since the product in
brackets is a scalar quantity. Similarly if a scalar (
is a second rank tensor since the product in
brackets is a scalar quantity. Similarly if a scalar ( ) product of two tensors is
substituted as in
) product of two tensors is
substituted as in  , the resulting tensor is four ranks less than the
original. The process of reducing the rank of a tensor by a scalar product is
known as contraction. The dot notation indicates the level of contraction and can
be extended to tensors of any rank. In continuum mechanics tensors of rank
greater than two are rare. The most common tensor operations to be
found in continuum mechanics other than those in Sections 2 and 3
are:
, the resulting tensor is four ranks less than the
original. The process of reducing the rank of a tensor by a scalar product is
known as contraction. The dot notation indicates the level of contraction and can
be extended to tensors of any rank. In continuum mechanics tensors of rank
greater than two are rare. The most common tensor operations to be
found in continuum mechanics other than those in Sections 2 and 3
are:
a vector product of a vector  and second rank tensor
and second rank tensor  to produce a
third rank tensor
to produce a
third rank tensor  whose components are
whose components are
 | (27) |
a scalar product of a vector  and third rank tensor
and third rank tensor  to produce a second
rank tensor
to produce a second
rank tensor  whose components are
whose components are
 | (28) |
a scalar ( ) product of a fourth rank tensor
) product of a fourth rank tensor  and a second rank tensor
and a second rank tensor
 to produce a second rank tensor
to produce a second rank tensor  whose components are
whose components are
 | (29) |
5 Coordinate System and Change of Axes
The base of reference for the physical quantities in continuum mechanics is the coordinate system in which we are working. The components of a tensor can change if the coordinate system undergoes a transformation. We must first investigate the properties of a set of axes in order to formulate rules for coordinate transformation.
5.1 Cartesian coordinates
We will confine our coordinate description to a set of right-handed rectangular
cartesian axes as shown in figure 3. This system of axes is constructed by
defining an origin  from which three lines are drawn at right angles to each
other, termed the
from which three lines are drawn at right angles to each
other, termed the  ,
,  and
and  axes. This notation is preferred to the
well-known
axes. This notation is preferred to the
well-known  as it relates better to the transformation equations. A
right-handed set of axes
as it relates better to the transformation equations. A
right-handed set of axes  is defined such that to an observer looking
down the
is defined such that to an observer looking
down the  axis, the arc from a point on the
axis, the arc from a point on the  axis to a point on the
axis to a point on the
 axis is in a clockwise sense.
axis is in a clockwise sense.
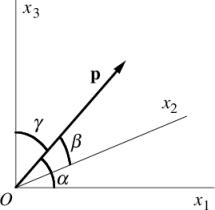
We can define a position vector  from the origin of a set of rectangular
coordinates which makes the angles
from the origin of a set of rectangular
coordinates which makes the angles  ,
,  ,
,  with the
with the  ,
,  and
and  axes
respectively. The directional cosines are then defined as
axes
respectively. The directional cosines are then defined as  ,
,  ,
,  .
The respective directional cosines can be expressed in index notation as
.
The respective directional cosines can be expressed in index notation as
 or simply:
or simply:
 | (30) |
5.2 Rotation of axes
Consider two right-handed sets of axes with the same origin, labelled  and
and  as shown in figure 4.
as shown in figure 4.
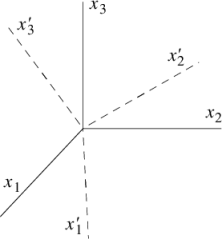
The sets of axes can be brought into coincidence by a rotation of axes. The
directional cosines of  relative to
relative to  can be used to express
can be used to express
 in terms of
in terms of  : the directional cosines of
: the directional cosines of  relative to
relative to
 are expressed as
are expressed as  ,
,  and
and  respectively; those of
respectively; those of  and
and
 are
are  ,
,  ,
,  and
and  ,
,  ,
,  . The transformation can be
summarised as:
. The transformation can be
summarised as:
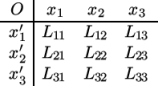 | (31) |
The matrix transformation can be expressed in a more compact form by
defining the group of directional cosines as a tensor  . A coordinate
. A coordinate  in
the
in
the  axes can then be represented in the
axes can then be represented in the  axes as:
axes as:
 | (32) |
Components of the transformation tensor L must satisfy certain conditions since they are defined by two right-handed sets of axes. Since the axes are mutually perpendicular:
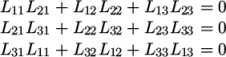 | (33) |
and since the sums of squares of directional cosines are unity:
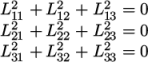 | (34) |
Equations (33 and (34) describe the orthonormality conditions which can be expressed in a more compact form:
 | (35) |
The transformation matrix must satisfy one further requirement which ensures that both the sets of axes are right-handed. It is:
 | (36) |
6 Tensor Calculus
This chapter has so far dealt with the algebra of tensors at a point. Tensors (of
any rank) in continuum mechanics vary with space and time and are therefore
tensor fields. Consequently we have to deal with derivatives of tensors in both
space and time. The subject of time derivatives warrants a longer discussion in
the context of kinematics, but here we simply introduce the concept of a total
time derivative of a tensor field denoted by  . If we take a position vector
. If we take a position vector
 of a particle of material at time
of a particle of material at time  the velocity
the velocity  is given by:
is given by:
 | (37) |
The time derivatives of other tensors are defined in the same way. The
familiar rules of a derivative of a product hold equally for two or more tensors as
for scalar quantities. However, it is important to stress that since some
operations, such as vector product ( ) are non-commutative, it is important to
preserve the order of operations, e.g.:
) are non-commutative, it is important to
preserve the order of operations, e.g.:
 | (38) |
6.1 Gradient
If a scalar field  is defined and continuously differentiable then the gradient of
is defined and continuously differentiable then the gradient of
 ,
,  is a vector
is a vector
 | (39) |
Here we introduce the nabla vector operator  , represented in index
notation as
, represented in index
notation as  :
:
 | (40) |
The nabla operator operates on the quantity to the right of it and as before
the rules of a derivative of a product still hold. Otherwise the nabla operator
behaves like any other vector in an algebraic operation. When working in index
notation, the use of  has advantages over other notations since it represents
the nabla operator as any other vector.
has advantages over other notations since it represents
the nabla operator as any other vector.
The derivative of  in the direction of the unit vector
in the direction of the unit vector  is given by:
is given by:
 | (41) |
where  is the angle between
is the angle between  and
and  . Assuming
. Assuming  ,
,  is
a maximum when
is
a maximum when  . Therefore the vector
. Therefore the vector  follows the direction in
which
follows the direction in
which  increases most rapidly with a magnitude
increases most rapidly with a magnitude  .
.
The gradient can operate on any rank tensor to produce a tensor
one rank higher. For example, the gradient of a vector  is a tensor
is a tensor
 | (42) |
By the same definition as Equation (41):
 | (43) |
The physical representation of the gradient of vector represent the maximum rate of change of the individual components of the vector.
6.2 Divergence
If a vector field  is defined and continuously differentiable then the divergence
of
is defined and continuously differentiable then the divergence
of  ,
,  is a scalar
is a scalar
 | (44) |
If  and
and  represent the divergence operator and vector
represent the divergence operator and vector  under a
rotation to new axes
under a
rotation to new axes  , then by Equation (32),
, then by Equation (32),
 | (45) |
since  is independent of
is independent of  and by the orthonormality condition
(Equation (35)). The divergence of a vector field is therefore a scalar
invariant.
and by the orthonormality condition
(Equation (35)). The divergence of a vector field is therefore a scalar
invariant.
The divergence can operate a tensor of rank 1 or above to produce a tensor one rank lower. For example the divergence of a second rank tensor T is a vector (expanding the vector in a column for convenience)
 | (46) |
The physical representation of divergence is discussed in Section 7 and is central to the understanding of continuum mechanics.
6.3 Curl
If a vector field  is defined and continuously differentiable then the curl of
is defined and continuously differentiable then the curl of  ,
,
 is a vector
is a vector
 | (47) |
Curl can operate on any tensor of rank one and higher to produce a tensor of the same rank. For example the curl of a second rank tensor T is a second rank tensor
 | (48) |
6.4 Laplacian
The Laplacian is a scalar operator defined by  . It can be deduced
that the laplacian is a scalar invariant operator since it is the scalar product of
two vectors, both the nabla operator. The laplacian of a scalar field
. It can be deduced
that the laplacian is a scalar invariant operator since it is the scalar product of
two vectors, both the nabla operator. The laplacian of a scalar field  is the
scalar:
is the
scalar:
 | (49) |
6.5 Useful tensor identities
Several identities are listed below which can be verified by under the assumption
that all the relevant derivatives exist and are continuous. The identities
are expressed for scalar  , vector
, vector  and (second rank) tensor
and (second rank) tensor 
 | (50) |
7 Integral Theorems
In the preceding sections we dealt with the behaviour of tensors at a point and
its representation of a tensor field. However, it is also necessary to consider the
behaviour of tensors over finite regions of space in order to derive many of the
equations of continuum mechanics. The derivations rely on some integral
theorems which are presented here without derivation in their most general forms
which are independent of the choice of coordinate system. The theorems relate
line  , surface
, surface  and volume
and volume  integrals which are merely generalisations of
the definite, double and triple integrals. For example, in the definite integral
integrals which are merely generalisations of
the definite, double and triple integrals. For example, in the definite integral
 | (51) |
we integrate along the  -axis between
-axis between  and
and  and the integrand
and the integrand  is a
function defined at each point between
is a
function defined at each point between  and
and  . In a line integral we integrate
over a curve in space and the integrand is defined at all points along
. In a line integral we integrate
over a curve in space and the integrand is defined at all points along  . In the
following theorems it is assumed that the curves and surfaces are piecewise
smooth, i.e. they consist of a finite number of smooth curves and surfaces
respectively.
. In the
following theorems it is assumed that the curves and surfaces are piecewise
smooth, i.e. they consist of a finite number of smooth curves and surfaces
respectively.
7.1 Gauss’s theorem
Gauss’s theorem relates the integral over an arbitrary volume of space to the integral over the surface bounding the volume. The generalised Gauss’s theorem takes the form
 | (52) |
where  is the unit normal vector to the
is the unit normal vector to the  and
and  can represent any
scalar, vector and tensor field which is defined and continuously differentiable
throughout
can represent any
scalar, vector and tensor field which is defined and continuously differentiable
throughout  . The star notation
. The star notation  is introduced to represent any product, i.e.
scalar
is introduced to represent any product, i.e.
scalar  , vector
, vector  , tensor
, tensor  . The star ‘
. The star ‘ ’ can therefore be replaced
by either a ‘
’ can therefore be replaced
by either a ‘ ’, a ‘
’, a ‘ ’ or nothing and the volume integral will contain a
’ or nothing and the volume integral will contain a  ,
,
 or
or  respectively.
respectively.
7.2 Stokes’s theorem
Stokes’s theorem relates the integral over a closed curve (represented by
 ) in space to the integral over a portion of an orientable surface in
space bounded by the curve. Stokes’s theorem applied to a vector
) in space to the integral over a portion of an orientable surface in
space bounded by the curve. Stokes’s theorem applied to a vector  is
is
 | (53) |
where  is the unit tangent vector along the curve.
is the unit tangent vector along the curve.
7.3 Physical representation of divergence and curl
Take a closed surface  bounding a volume
bounding a volume  and consider the integral
and consider the integral 
 | (54) |
If  is directed away from the enclosed volume,
is directed away from the enclosed volume,  and the field
and the field  is
diverging from
is
diverging from  . if
. if  is directed towards it,
is directed towards it,  and the field
and the field  is
converging towards
is
converging towards  . In general,
. In general,  may take positive or negative values
around
may take positive or negative values
around  and the sign of
and the sign of  will indicate whether the field is convergent or
divergent. If we collapse our volume to a single point
will indicate whether the field is convergent or
divergent. If we collapse our volume to a single point  , the sign of
, the sign of  represents whether the field in the neighborhood of
represents whether the field in the neighborhood of  is divergent or
convergent and its magnitude represent the strength of divergence or
convergence.
is divergent or
convergent and its magnitude represent the strength of divergence or
convergence.
In the context of continuum mechanics, in a motion of an incompressible
medium the net flow through a volume of material must be zero, i.e. the net flux
of velocity  across the surface bounding the volume must be zero. Therefore,
across the surface bounding the volume must be zero. Therefore,
 | (55) |
and by vanishing  to a point, it can be concluded that the condition for
incompressibility is that
to a point, it can be concluded that the condition for
incompressibility is that  at all points.
at all points.
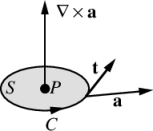
In order to understand the physical significance of  , we take an
arbitrary circular disk bounded by the closed curve
, we take an
arbitrary circular disk bounded by the closed curve  and centred at a point
and centred at a point
 . The disc is oriented with its normal axis in the direction of
. The disc is oriented with its normal axis in the direction of  at
at  as
shown in figure 5. If we consider
as
shown in figure 5. If we consider
 | (56) |
Since  and
and  are in the same direction
are in the same direction  . This
indicates that the field in the neighbourhood of
. This
indicates that the field in the neighbourhood of  is either rotating, when
is either rotating, when
 , or irrotational when
, or irrotational when  . The condition for an irrotational field
. The condition for an irrotational field
 must be
must be  . In continuum mechanics, flows are termed irrotational
when
. In continuum mechanics, flows are termed irrotational
when  .
.
7.4 Scalar and vector potentials
One of the relationships in Eqn. (50) is  . It can be shown that if
a vector field
. It can be shown that if
a vector field  defined in a (singly connected) region is such that
defined in a (singly connected) region is such that  ,
then a scalar potential field
,
then a scalar potential field  exists such that
exists such that  .
.
We define two scalar potentials,  and
and  such that
such that  and
let
and
let  . It can be seen that
. It can be seen that  which means
which means  must be
independent of the coordinate system, i.e.
must be
independent of the coordinate system, i.e.  . This shows that the
scalar potential is unique apart from an additive constant.
. This shows that the
scalar potential is unique apart from an additive constant.
A generalisation of the statement given at the end of Section 7.3 is that any
vector field  for which
for which  is said to be irrotational. For such a field
the line integral between two points
is said to be irrotational. For such a field
the line integral between two points  and
and 
 | (57) |
is independent of the path of integration and is said to be conservative. The scalar potential is used in many areas of continuum mechanics. It is often adopted to reduce the complexity of a problem by reducing a vector field to a scalar field although, in doing this, we are making the assumption that that the field is irrotational.
Another of the relationships in Eqn. (50) is  . It can be
shown that if a vector field
. It can be
shown that if a vector field  defined in a (singly connected) region is
such that
defined in a (singly connected) region is
such that  , then a vector potential field
, then a vector potential field  exists such that
exists such that
 .
.
We define two scalar potentials,  and
and  such that
such that  and let
and let  . It can be seen that
. It can be seen that  which means a
scalar field
which means a
scalar field  exists such that
exists such that  . This shows that the vector
potential is unique apart from an addition of the gradient of an arbitrary
scalar field. A vector field
. This shows that the vector
potential is unique apart from an addition of the gradient of an arbitrary
scalar field. A vector field  which satisfies
which satisfies  is said to be
solenoidal.
is said to be
solenoidal.
Helmholtz’s theorem combines vector and scalar potentials in the statement
that any continuously differentiable vector field  can be decomposed into the
sum of a irrotational scalar field
can be decomposed into the
sum of a irrotational scalar field  and a solenoidal vector field
and a solenoidal vector field  ,
,
 | (58) |
The regions of a field  where
where  are often termed sources of
are often termed sources of  ,
and regions where
,
and regions where  are called vortices of
are called vortices of  .
.